
The revolution behind the wheel: how autonomous driving will change travel
The impact on our habits and the many opportunities of new technologies to be ‘handled with care
The world of transport is in the midst of an extraordinary transformation process: after several decades in which technologies developed without ever radically affecting the habits of us all, in recent years we are witnessing major changes in a similar way to what has happened in the telecommunications sector since the advent of mobile phones.
Intelligent transport systems are becoming more and more cooperative and interconnected (we talk about Cooperative Intelligent Transport Systems or C-ITS) and thanks to new technologies (mobile telephony, Internet of Things, Big Data, artificial intelligence) we can benefit from increasingly advanced localisation, analysis and forecasting functionalities that can produce new and more effective forms of mobility (such as car and bike sharing) and travel planning aids (so-called travel planners or apps for booking and paying for taxis and parking).
Among the great innovations of this new wave of mobility, a starring role must surely be given to self-driving vehicles, vague in futuristic scenarios of the 1950s, then forgotten by technological progress for half a century, and finally reappearing powerfully on the international scene.
The different levels of driving automation
Today, car manufacturers, ICT and telecommunications companies are investing significant resources in the development of various devices (such as automatic speed and braking control or parking assistant) already on the market to improve the driving experience. These increasingly active tools are generally referred to as advanced driver assistance systems (ADAS), which, however, do not imply any release of driver attention or reduction of driving ability and are intended as a support for safety or comfort.
The gradual evolution of these systems will in a few years’ time lead to cars capable of performing more and more actions autonomously in increasingly complex scenarios, as outlined in the different levels of automation by the Society of Automotive Engineers, up to the possibility of driverless vehicles capable of interacting with each other and the surrounding environment, even handling exceptions in a safe manner.
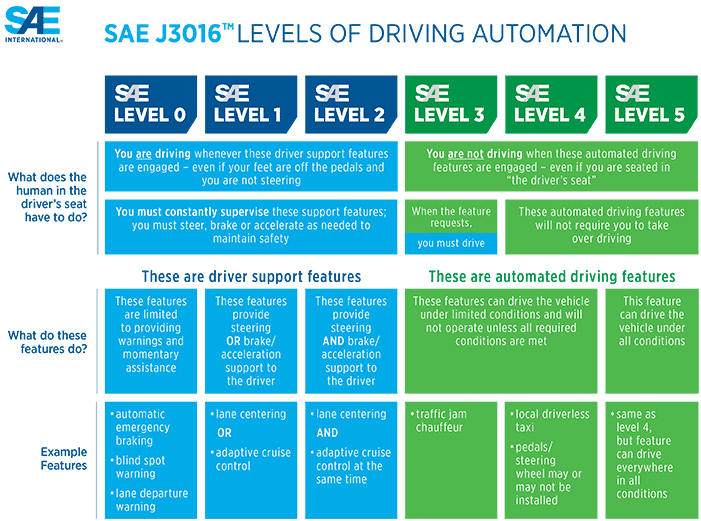
The different levels of automation – Society of Automotive Engineers-SAE) – https://www.sae.org
The driverless car scenario is not yet fully explored and a lot of research is underway to fully understand its technological, transport, but also ethical implications (a very complex topic that we will address in one of our next articles). The industry clearly sees enormous potential for a new market that is expected to radically change the transport system in the coming decades. Institutions, for their part, are stimulating research and business development for the introduction of new services, products or processes that can improve the mobility of goods and passengers and at the same time regulate these developments while preserving citizens’ rights and fair market competition.
Changes in the mobility system
One aspect on which it is interesting to reflect concerns the effects of the profound changes in our travel habits that are likely to take place in the next few years: autonomous driving will require less and less driving skills from the driver and this will certainly contribute greatly to increased safety on our roads (there is talk of a 90 per cent reduction in fatal accidents) and better accessibility for people with disabilities, but at the same time it could introduce impacts that are worth considering.
In a self-driving car, it will be possible to perform actions that would be unthinkable today while driving, and thus we will all change our perception and estimation of the value of time spent in the car; it will be possible to have business meetings for example, and this will incentivise travel that takes place in a ‘productive’ life time. The impacts on traffic and land consumption are likely to be considerable if not considered early enough, as individual comforts usually distract people from perceiving the collective effects of their behaviour. There is not only the environmental aspect to be considered: if in addition to being self-driving, all vehicles were (almost) zero-impact (ZEV – Zero-Emission-Vehicles), this collective system of behaviour that self-supports ever-increasing mobility needs would be reinforced by the dropping of residual ecological qualms. What would become of the use of public land at that point? We cannot afford to travel at rates of one person per car simply because there is no physical space in our cities and the implications, if not environmental, would be severe from the point of view of accessibility of places, i.e. with social and economic repercussions.
The future transport system without a concrete and far-sighted governance of mobility policies would necessarily tend towards disorder, as individual behaviour is the most rewarding for individuals, and the already marginal level of virtuous behaviour (the use of collective transport) dictated solely by voluntarist approaches would free up space for further individual behaviour by those who would benefit from it.
It is therefore necessary to think about a new approach to planning and regulating mobility systems, which can no longer be based on public awareness or on enforcement policies, both of which are difficult to apply on a massive scale.
Institutions will have to adopt new governance models capable of dealing with technological change in a timely manner and keeping pace with it, models that are dynamic as well as current, and which affect urban planning (with self-driving cars, much less parking will probably be required), behavioural (capable of regulating the use of individual modes of transport) and transport (new integrated models of mobility provision such as MaaS, which we have discussed in this article).
FIT Consulting’s role
FIT Consulting is a key player in the changes related to autonomous driving, having worked on the strategic part of industrial development projects related to communication systems between vehicles (Vehicle-to-Vehicle – V2V) and between vehicles and infrastructures (Vehicle2Infrastructure – V2I). He also co-ordinated the working group on automated vehicles in the Italian Technical Committee on Autonomous Driving of the World Road Association (PIARC) for which he edited the publication ‘Guida Autonoma e Smart Road’ published by the DEI Civil Engineering Printing House.
(Photo: Steve Jurvetson)




